

Thymio est un robot éducatif open source qui a été créé à l'école polytechnique fédérale de Lausanne (EPFL) en collaboration avec l'école cantonale d'art de Lausanne (ECAL) en 2011.
Les 6 comportements
Le Thymio est un robot éducatif qui se base sur trois piliers :
1) une grande quantité de capteurs et d’actuateurs,
2) une interactivité très poussée, surtout en ce qui concerne la compréhension du fonctionnement des capteurs.
3) une programmation facile, grâce à l’environnement d’Aseba.
Un des principaux atouts pédagogiques du robot Thymio tient à l’usage qu’il fait de la lumière pour rendre visible son fonctionnement. Équipé de neuf capteurs (cinq vers l’avant, deux vers l’arrière et deux vers le bas), ceux-ci se colorent en rouge lorsqu’ils sont activés par les objets que Thymio rencontre lors de ses déplacements.
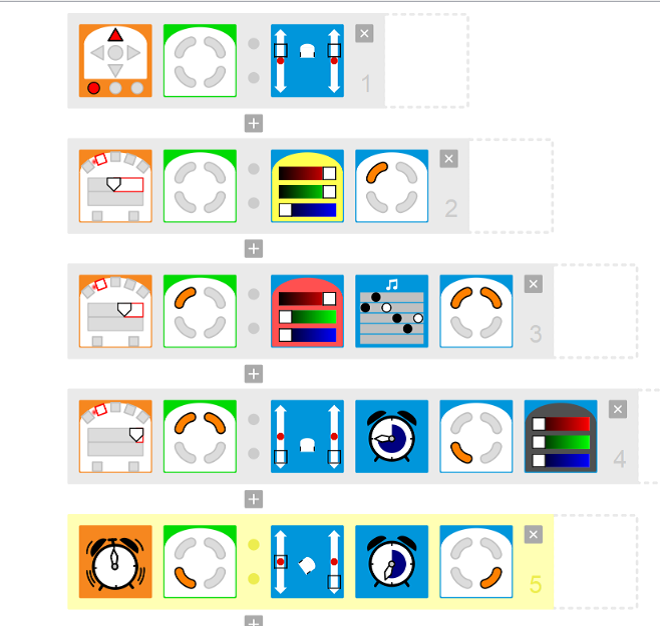
Thymio est pré-programmé avec six comportements. Ces comportements sont toujours présents dans le robot. Pour en choisir un, démarrez le robot et sélectionnez une couleur grâce aux boutons flèches, le bouton central permettant de démarrer le comportement. Ensuite, le bouton central permet de revenir au menu de sélection des comportements.
Capteurs et actuateurs
Thymio utilise aussi la lumière en affichant extérieurement les six différents types de comportement qu’il peut adopter par le biais de six couleurs :
Vert: Thymio l’amical suit un objet situé devant lui
Jaune: Thymio l’explorateur explore le monde tout en évitant les obstacles
Rouge: Thymio le peureux fuit ce qui l’approche, détecte les chocs, la chute libre et indique la gravité
Mauve: Thymio l’obéissant exécute les ordres donnés par les boutons ou une télécommande
Turquoise: Thymio l’enquêteur suit une piste
Bleu: Thymio l’attentif réagit au son.
Thymio peut être programmé de deux façons différentes, visuellement ou textuellement.

Programmation
Thymio peut être programmé grâce au logiciel Aseba. Aseba est un ensemble d'outils qui permet aux novices de programmer facilement et efficacement des robots.
Pour installer Aseba, y compris VPL, rendez-vous sur https://www.thymio.org/fr:start et cliquez sur l’icône correspondant à votre système (Windows, Mac OS etc.). Suivez les instructions pour télécharger et installer l’application.
Aseba est composé de :
- Programmation visuelle (VPL) : https://www.thymio.org/fr/programmer/vpl/
La programmation visuelle est un composant d'Aseba. Cet environnement a été conçu spécialement pour programmer Thymio facilement en combinant des blocs événement et des blocs action.
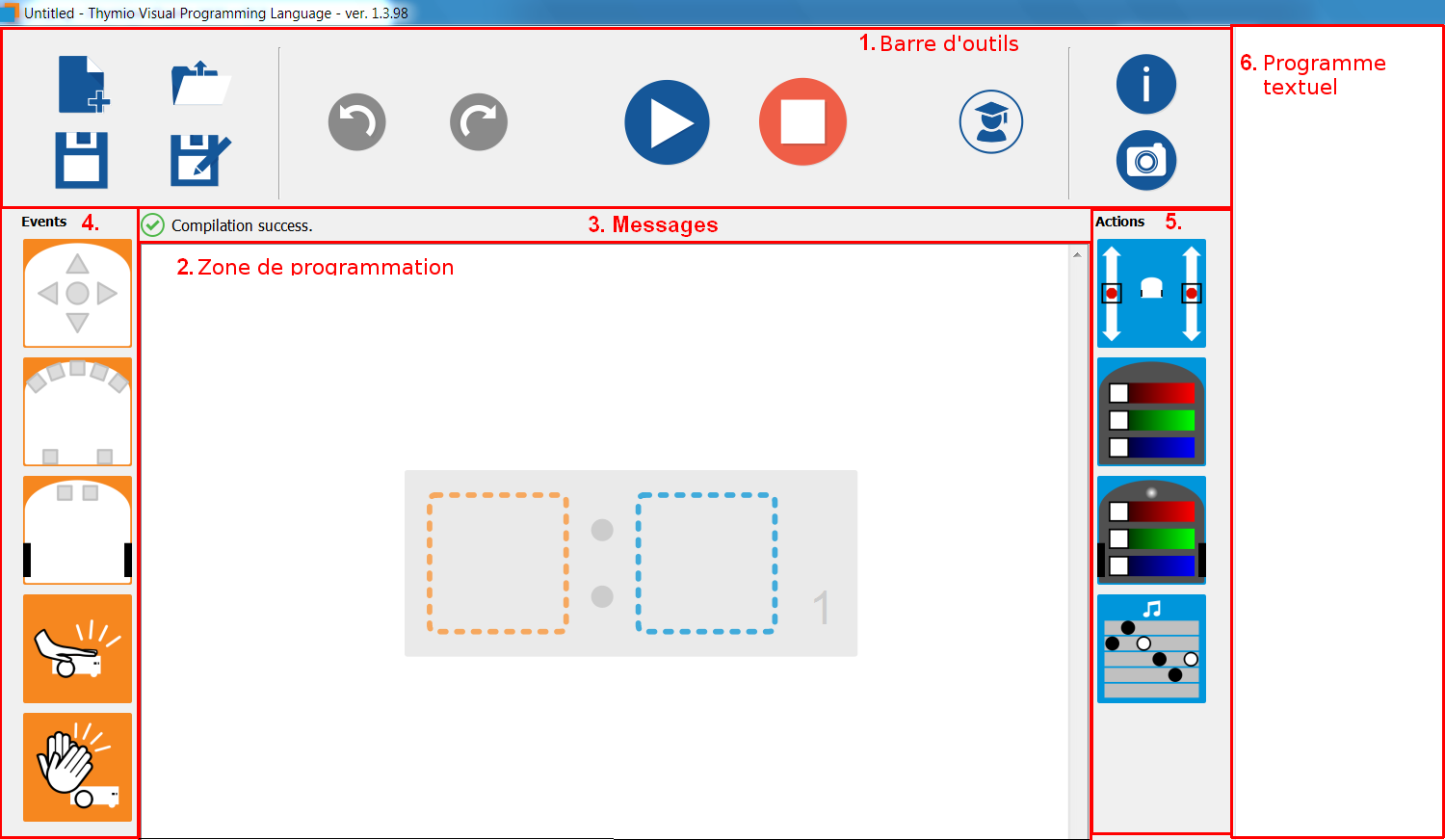
L’interface VPL est composée de six zones :
1. Une barre d’outils avec les boutons pour créer un nouveau programme, en ouvrir un existant, sauvegarder, lancer le programme, etc.
2. La zone de programmation pour construire le programme qui contrôlera Thymio.
3. Une zone de messages qui donne les messages d’erreur lorsque le programme n’est pas construit correctement.
4. Les blocs d’événement disponibles pour construire votre programme.
5. Les blocs d’action disponibles pour construire votre programme.
6. La traduction du programme en AESL, le langage textuel d’Aseba.
Comment programmer ?
Programmer dans VPL se fait en associant un bloc événement à un ou plusieurs bloc(s) action(s). Vous pouvez faire cela en glissant des blocs, depuis les listes d'événements ou d'actions des côtés de l'écran, sur des paires dans la zone centrale de programmation.
- Programmation Blockly : https://www.thymio.org/fr/programmer/blockly/
Développé par Google, Blockly est un pont idéal entre la programmation visuelle et textuelle. Il suffit d'assembler des blocs visuels dans lesquels se trouvent du texte pour programmer Thymio.
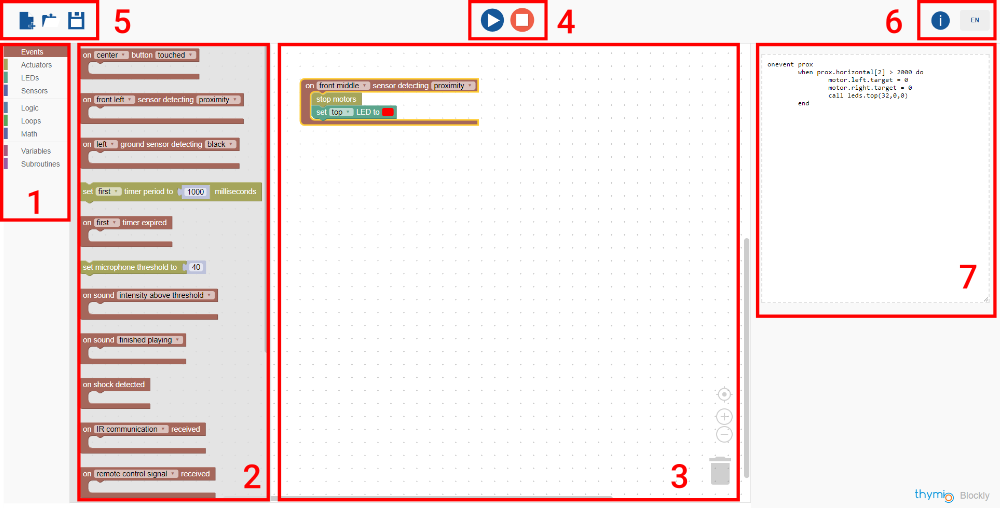
L'interface de Blockly est composée de :
- Une liste des catégories (événements, actionneurs, LED…) qui regroupe les blocs
- La fenêtre de sélection des blocs
- La zone de programmation, dans laquelle vous glissez et assemblez les blocs pour programmer
- Les boutons "Play" et "Stop", qui chargent et arrêtent les programmes et le robot
- Les icônes "Nouveau", "Ouvrir" et "Enregistrer Sous"
- La documentation en ligne et le bouton de sélection de langue
- L'équivalence du programme en format texte Aseba (non modifiable)
Comment programmer ?
- Choisissez une catégorie (commencez par un événement)
- Choisissez un bloc et glissez-le dans la zone de programmation
- Ajoutez d'autres blocs pour créer des groupes
- Appuyez sur Play, et voilà !
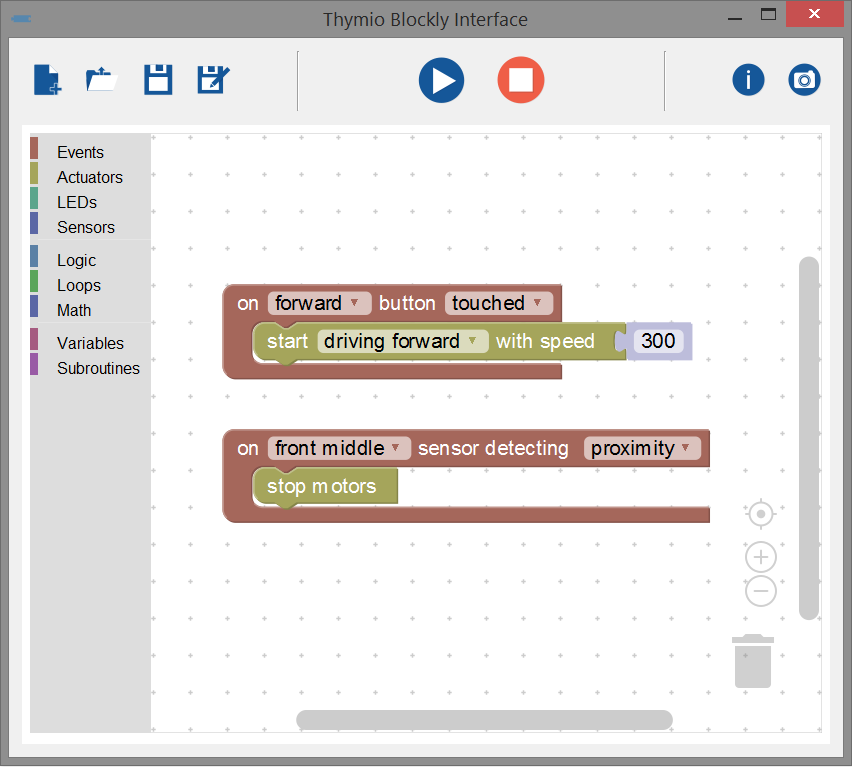
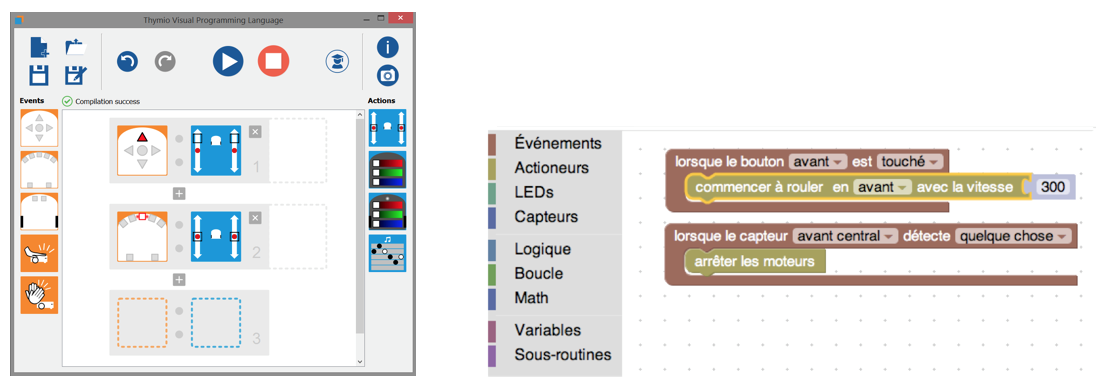
Voici un exemple de ce à quoi un programme écrit avec VPL ressemble avec Blockly. Les deux programmes créent le même comportement pour le robot !
- Programmation texte : https://www.thymio.org/fr/programmer/aseba/
Aseba Studio est un composant d'Aseba conçu pour programmer des robots comme Thymio en écrivant du code texte. Cela permet d'avoir un niveau de contrôle plus grand qu'avec la programmation visuelle.
VPL traduit les programmes graphiques (les paires événement-action) en programmes textuels AESL.
Lorsque vous travaillez dans Aseba Studio, vous pouvez ouvrir VPL en cliquant sur le bouton « Lancer VPL » dans l’onglet Outils en bas à gauche de la fenêtre. Vous pouvez importer des programmes VPL vers Aseba Studio, simplement en ouvrant le fichier du programme.

Autres options de programmation
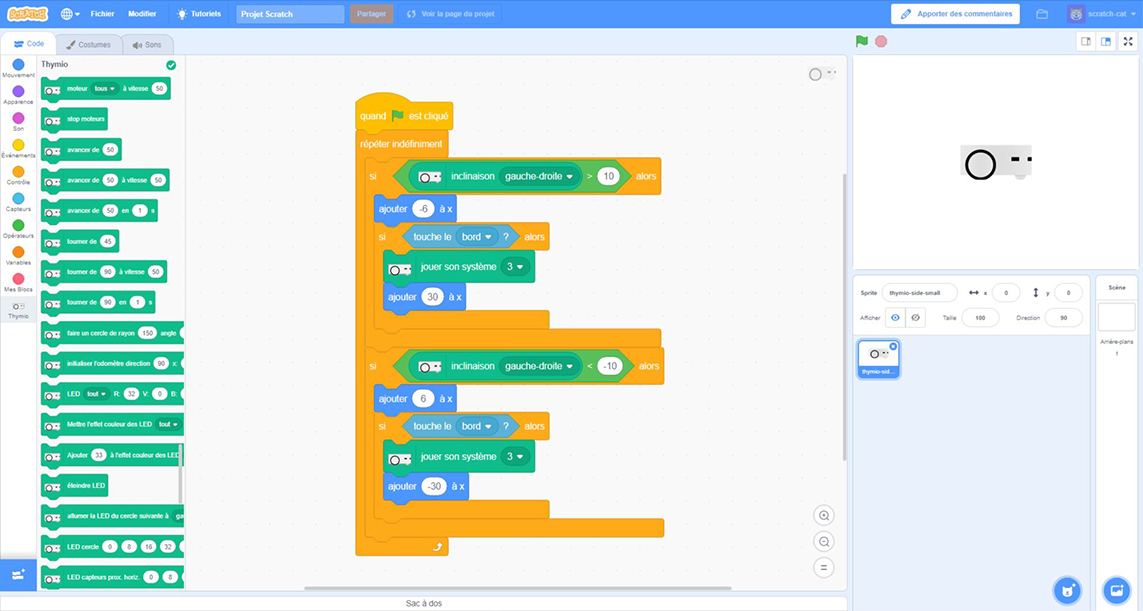
- Programmation Scratch : https://www.thymio.org/fr/programmer/scratch/
Asebascratch est un logiciel qui fait le lien entre Scratch 2 et le robot THymio. Il permet notamment de télécommander Thymio à l'aide d'un programme écrit avec Scratch 2, afin de lui permettre d'éviter des obstacles, de suivre une ligne, d'éviter de tomber de la table, de lire des codes barres, de faire des dessins, de jouer & enregistrer des sons et encore beaucoup d'autres choses !
Configuration requise
Aseba peut être installé sur Linux, Mac OS et Windows.
Quelques vidéos explicatives
Pour réserver la malle :
Découvrez notre fiche-action pour organiser une animation avec ce robot : ![]() Jouer avec les robots Thymio
Jouer avec les robots Thymio



